Трелевочные тракторы на рубках лесных насаждений
Часть 1
В 1947 г. в СССР разработали и начали производить на Онежском тракторном заводе первый в мире специальный гусеничный трелевочный трактор со скользящим канатно-чокерным оборудованием и газогенераторным двигателем – КТ-12. Получается, начиная со второй половины ХХ в. и до развала СССР наша страна была лидером в разработке и производстве лесных машин...
В подтверждение этого (весьма неожиданного сегодня) факта стоит упомянуть, что знаменитый «потомок» КТ-12 – специальный гусеничный трелевочный трактор со скользящим канатно-чокерным оборудованием ТДТ-55 экспортировался в 55 стран мира.
Из истории вопроса
Если взять не только лесные машины, но и все лесозаготовительное оборудование, то всемирная известность бензиномоторных пил линейки «Дружба» тоже говорит о многом – по сей день их можно встретить на почетных местах в музеях леса многих стран мира (хотя изначально в разработке и производстве бензиномоторных пил СССР отставал примерно на 40 лет!). Не лишним будет упомянуть первую в мире валочно-пакетирующую машину (ВПМ) ЛП-2 «Дятел», разработанную в латвийском научно-производственном объединении «Силава».
За вышеперечисленными (и многими другими передовыми для своего времени) лесными машинами и оборудованием стоит труд большого количества коллективов отраслевых научно-исследовательских институтов (НИИ), конструкторских бюро (КБ), проблемных лабораторий отраслевых вузов и возглавлявших эти коллективы ученых. Центральный научно-исследовательский институт лесосплава (ЦНИИЛесосплава), Центральный научно-исследовательский институт механизации и энергетики лесного комплекса (ЦНИИМЭ), Карельский научно-исследовательский институт лесной промышленности (КарНИИЛП)… список можно продолжать долго.
Отцом-основателем, по образному выражению, лесной тракторной техники, прежде всего гусеничной, в нашей стране стал лауреат Сталинской премии, доктор технических наук, профессор С. Ф. Орлов, под руководством которого был разработан и поставлен на производство первый в мире трелевочный трактор КТ-12 и многие его последующие модели. Профессор Орлов также разработал концепт и принимал активное участие в постановке на производство на Онежском тракторном заводе (ОТЗ) первых в мире бесчокерных трелевочных тракторов – ТБ-1, ТБ-1М. Аналогично были созданы бесчокерные трелевочные тракторы на базе тракторов Алтайского тракторного завода (АТЗ) – ЛП-18, ЛП-18Г. Основной цель разработки бесчокерных трелевочных тракторов было повышение степени механизации лесосечных работ и сокращение необходимого количества персонала за счет высвобождения рабочих-чокеровщиков, труд которых физически тяжелый, травмоопасный и низкоквалифицированный, а потому низкооплачиваемый.
За 25 лет после распада СССР отечественное лесное машиностроение было по существу уничтожено. Перестали существовать ОТЗ и АТЗ, а также многие тракторные заводы, выпускавшие колесные тракторные базы для лесных машин. Ликвидированы и специализированные НИИ и КБ. На лесозаготовительных предприятиях РФ стали использовать машины почти исключительно иностранного производства, причем только из западных (в настоящее время недружественных) стран.
Несмотря на многочисленные обсуждения и принятие программных документов по развитию отечественного лесного машиностроения, положительных сдвигов в этом деле к моменту начала СВО и связанной с ней санкционной войны против России не произошло. В результате на лесозаготовительных предприятиях России сложилась очень сложная ситуация с обновлением и поддержанием в работоспособном состоянии имеющегося парка лесных машин.
Ряд машиностроительных предприятий начали возрождать выпуск разработанных еще во времена СССР и морально устаревших образцов лесной техники. Но большинство лесозаготовителей уже не готовы возвращаться к старой технике и технологиям. Производить конкурентоспособную современным импортным машинам технику не получается в связи со сложностями оснащения ее современной электронной базой (не производящейся в России), а также проблемами с проектированием, поскольку специализированные отечественные НИИ и КБ, персонал и соответствующие компетенции во многом утрачены.
В связи с этим на краткосрочную перспективу наиболее предпочтительным вариантом выпуска российских лесных машин, прежде всего трелевочных, становится вариант постановки на производство такой техники, которая предполагает возможный минимум тяжелого ручного труда и необходимого персонала, максимально универсальной и простой по конструкции, с тем чтобы существенно сократить сроки ее запуска в серийное производство.
Из трелевочных машин поставленной задаче удовлетворяют бесчокерные трелевочные тракторы, которые можно выпускать не только на гусеничных шасси, но и на колесных базах универсальных сельскохозяйственных или промышленных колесных тракторов. Более того, в определенных системах машин (лесозаготовительных комплексах) таким тракторам даже гидроманипулятор может не потребоваться! Достаточно будет коникового зажимного устройства.
Чокерные трелевочные тракторы
В СССР доминировали гусеничные тракторы. Они проще по конструкции и в изготовлении, более надежные и проходимые, особенно в сложных условиях эксплуатации. Именно поэтому в качестве базы для первого в мире специального трелевочного трактора был выбран гусеничный (трофейный) трактор, у которого подняты передние и задние гусеничные звездочки, а также установлено специальное скользящее, канатное, чокерное технологическое оборудование. В дальнейшем совершенствование трелевочных тракторов шло по пути как улучшения конструктива двигателя и трансмиссии, так и совершенствования технологического оборудования. И чокерные тракторы эволюционировали в бесчокерные, затем в пачкоподборщики.
Следует отметить, что скандинавская сортиментная технология заготовки древесины, ныне преобладающая в России и в мире, далеко не оптимальная с точки зрения возможного выхода деловой древесины. Это связано с тем, что в условиях леса почти невозможно выбрать наилучшую программу раскроя хлыста с учетом требований сортиментного плана, породы, размеров и, главное, пороков ствола, как видимых, так и скрытых.
Настоящий прорыв в этом процессе совершили разработчики первого в мире специального трелевочного трактора КТ-12, предложившие часть пачки трелюемых лесоматериалов (деревьев, хлыстов, полухлыстов) крепить на тракторе. Таким образом пачка лесоматериалов была погружена на трактор наполовину, и такую трелевку стали называть трелевкой в полупогруженном положении.
Этот способ кратно сократил силу сопротивления перемещения трелюемой пачки лесоматериалов. Торцы уже не цеплялись за различные препятствия, а пачка не соприкасалась с почвогрунтом всей поверхностью. В результате при тех же энергозатратах стало возможным трелевать пачки значительно большего объема и на бóльших скоростях, что, в свою очередь, кратно повышало производительность.
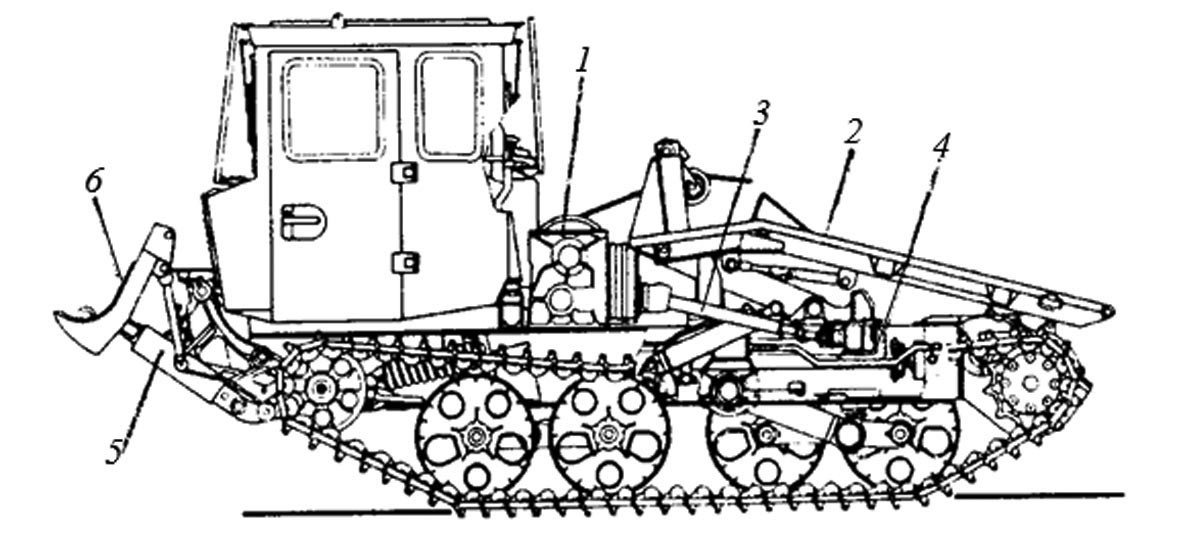
Технологическое оборудование чокерных трелевочных тракторов отличается простотой, надежностью, невысокой стоимостью и малым весом (рис. 1). Последнее обстоятельство позволяет при прочих равных условиях повышать полезную рейсовую нагрузку такого трактора в сравнении с нагрузкой трелевочных тракторов других типов.
Собственно чокеры (рис. 2) представляют собой отрезки стального каната с кольцом с одной стороны и крюком или бобышкой – с другой. Кольца нужны для крепления чокеров к собирающему канату. При помощи крюков/бобышек чокеры и крепятся на трелюемых лесоматериалах. Обычно индивидуально (один чокер – один ствол), но в ряде случаев, при трелевке хлыстов за вершины и при их удачном расположении, одним чокером можно закрепить два хлыста.
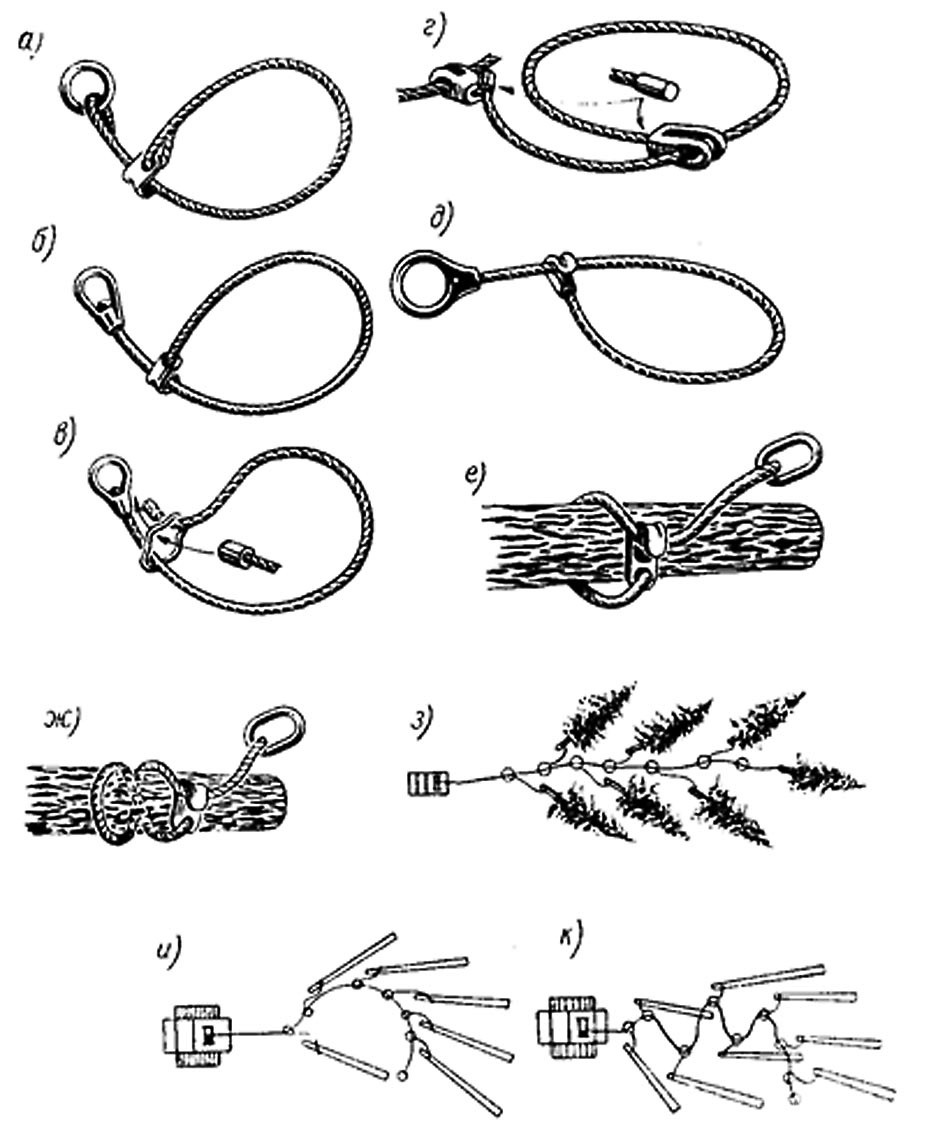
При трелевке за вершины появляется возможность собрать и закрепить на тракторе пачку бóльшего объема, чем при трелевке хлыстов или деревьев за комли. Чем меньше объем хлыста на разрабатываемой лесосеке, тем больше надо закрепить стволов для набора полновесной пачки, а значит, требуется больше чокеров в комплекте на один трактор.
Для работы чокерного трелевочного трактора необходимы два человека – тракторист и чокеровщик (правда, в некоторых лесозаготовительных бригадах обязанности чокеровщика совмещают вальщики леса). Для набора пачки трактор, развернувшись на пересечении магистрального и пасечного трелевочных волоков, задним ходом заходит по пасечному трелевочному волоку к месту набора пачки. Затем щит опускается на землю (со стороны кажется, что он поднят над трактором), и, чтобы заглубить щит трактора в снег или почвогрунт, делается небольшой рывок трактора задним ходом. После этого чокеровщик разматывает с барабана лебедки собирающий канат и оттаскивает его к месту набора пачки (для облегчения привод лебедки включается на размотку). Чокеровщик последовательно крепит чокеры на стволы и, когда вся возможная пачка оказывается зачокерована, отходит на безопасное расстояние и дает трактористу сигнал, по которому тот включает привод лебедки на намотку собирающего каната. Пачка затягивается на щит, щит опускается на трактор, барабан лебедки затормаживается – и трактор готов совершить грузовой ход в сторону верхнего склада.
Описанный вариант сбора пачки имеет преимущества: самый легкий, простой и дешевый состав технологического оборудования (максимальная грузоподъемность, минимальный удельный расход топлива); есть возможность сбросить и затем подтянуть пачку, если трактор застрял в топком месте.
Однако есть у него и недостатки: работа чокеровщика тяжелая физически и травмоопасная; чокеровка пачки занимает много времени, что негативно сказывается на производительности; на верхнем складе с притрелеванной пачки нужно отцеплять чокеры, на это тратится рабочее время персонала.
Бесчокерные трелевочные тракторы
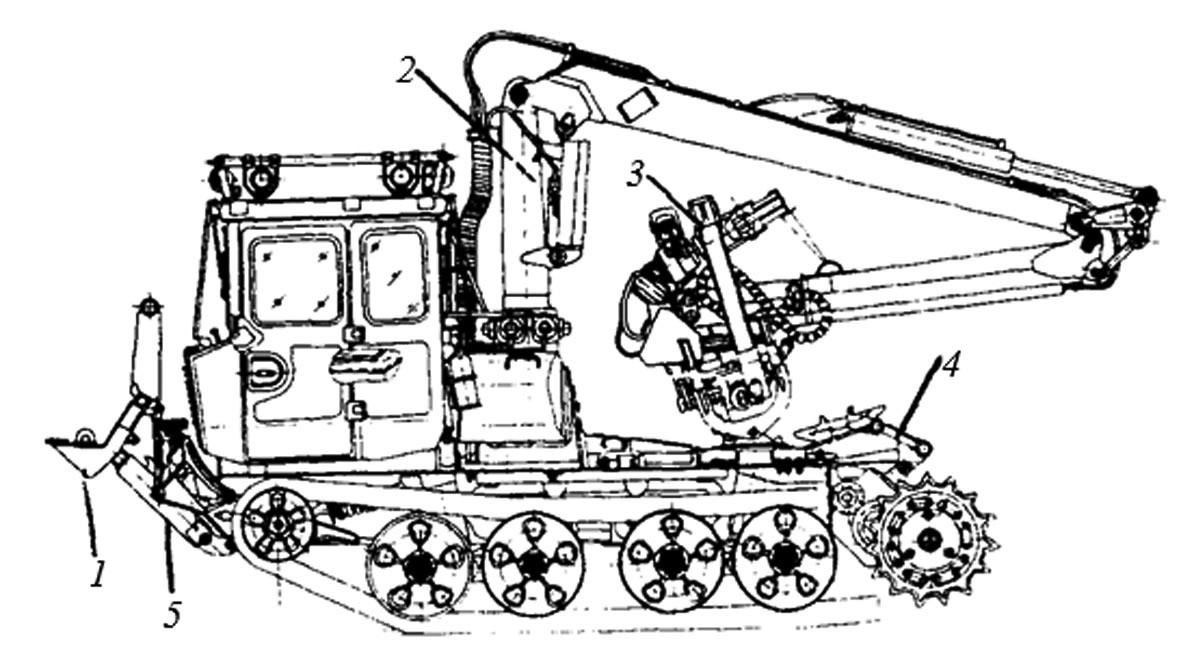
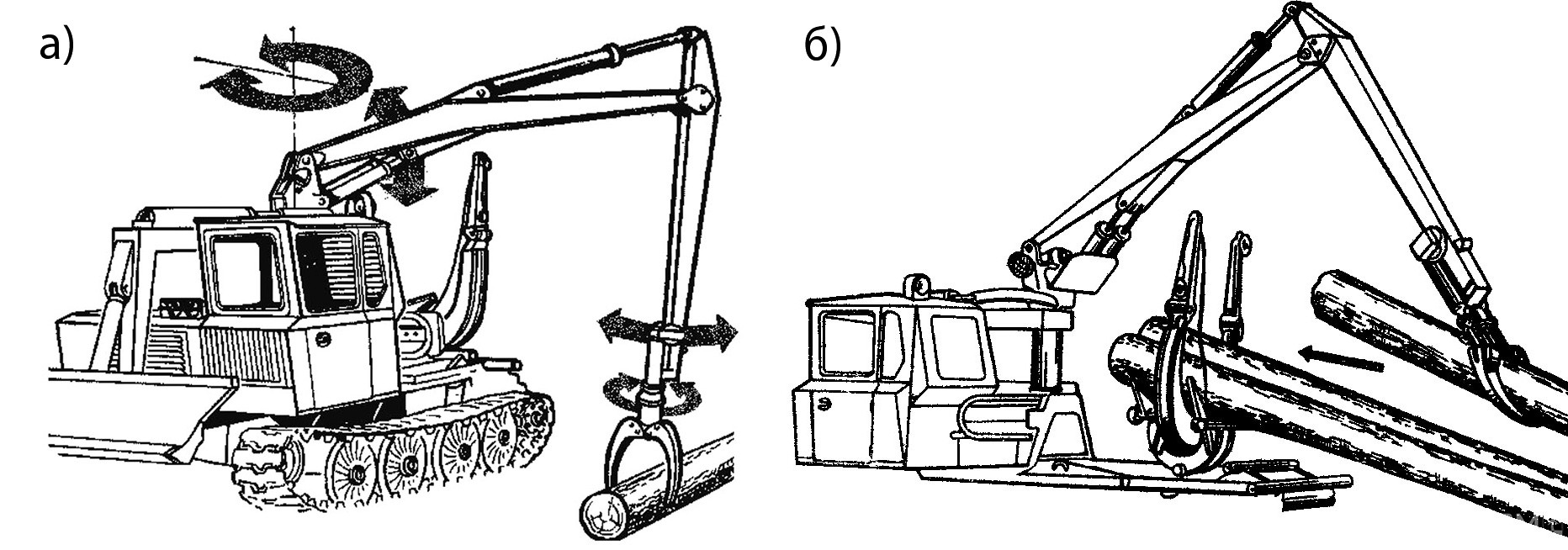
Еще в середине 50-х годов прошлого века начались разработки технологического оборудования трелевочных тракторов, позволяющего исключить труд чокеровщиков. Эту задачу успешно решил коллектив во главе с профессором С. Ф. Орловым. Тракторы, не имеющие в составе оборудования чокеров и не нуждающиеся в чокеровщиках, назвали бесчокерными. На смену лебедке, щиту, собирающему канату и чокерам пришли гидроманипулятор с грейферным захватом и кониковое зажимное устройство (рис. 3).
Бесчокерный трелевочный трактор, подобно предшественнику, осуществляет трелевку в полупогруженном положении, но для выполнения всего технологического цикла по сбору, трелевке и штабелевке пачки деревьев или хлыстов ему достаточно одного оператора.
При сборе пачки трактор заходит по пасечному волоку на примерную длину ленты набора пачки, разворачивается и, двигаясь в сторону уса лесовозной дороги, начинает собирать ранее поваленные деревья или подготовленные хлысты. На технологической стоянке бесчокерный трактор раскрывает кониковый зажим и при помощи грейферного захвата, установленного на свободном конце гидроманипулятора, поштучно укладывает лесоматериалы в раскрытый зажим (рис. 4). Деревья укладываются на трактор комлями, хлысты – обычно вершинами.
После завершения сбора всех лесоматериалов, до которых можно дотянуться гидроманипулятором с одной стоянки, кониковый зажим закрывается и трактор перемещается вперед, к следующей технологической стоянке. И так продолжается до набора полновесной пачки (оптимальной по объему в условиях данной лесосеки).
Собранную полновесную пачку лесоматериалов трактор трелюет на верхний склад/погрузочный пункт, там раскрывает кониковый зажим и выезжает из-под пачки. Затем разворачивается и при помощи толкателя уплотняет пачку в штабель, после чего он готов к следующему рейсу.
Плюсы этого варианта сбора пачки: полная механизация труда – не нужен чокеровщик, все делает оператор; повышается скорость набора пачки, то есть увеличивается производительность; трактор может догрузиться до оптимального объема пачки.
Минусы: оборудование по сравнению с чокерными тракторами более тяжелое, сложное и дорогое, отсюда больше коэффициент тары трактора, меньше полезная грузоподъемность, выше удельный расход топлива и удельная стоимость трелевки кубокилометра; при застревании на лесосеке трактор не может выбраться вместе с пачкой (без нарушения инструкции по эксплуатации).
Неидеальное техническое решение вызвало необходимость разработки новых, принципиально иных, технических устройств.
Текст: Анастасия Помигуева, магистрант, АГАТУ
Ольга Куницкая, д-р техн. наук, АГАТУ
Александр Швецов, начальник учебной лаборатории, Сызранский филиал ВВА им. Н. Е. Жуковского и Ю. А. Гагарина
Илья Должиков, д-р техн. наук, СПбГАСУ
Ольга Григорьева, канд. с.-х. наук, СПбГЛТУ им. С. М. Кирова