Метод оптического распознавания образов - средство оптимизации производства
Сырьем для основного производства плитных заводов, а также целлюлозно-бумажных комбинатов является технологическая щепа, которую обычно производят в древесно-подготовительных цехах бирж сырья этих предприятий. Очевидно, что от эффективности технологических процессов и качества технологической щепы во многом зависит эффективность работы и качество изготавливаемой продукции.
Значительный грузооборот древесно-подготовительных цехов при часто меняющихся физико-механических свойствах древесного сырья, а также несовершенство технологий обуславливают неоптимальность показателей процессов переработки древесины в щепу, излишние потери сырья (отходы) и повышенные затраты энергии. Таким образом, исследования, направленные на повышение эффективности автоматизации технологических процессов древесно-подготовительных цехов, вполне актуальны.
Современные подходы к автоматизации основных технологических операций древесно-подготовительных цехов основаны прежде всего на использовании метода и средств оптического распознавания образов с целью оптимизации производства. Однако до сих пор нет исследований, посвященных обоснованию оптимального метода распознавания образов применительно к прикладным задачам оценки оптимальности работы оборудования древесно-подготовительных цехов.
Для повышения эффективности работы линии изготовления технологической щепы учеными научной школы «Инновационные разработки в области лесозаготовительной промышленности и лесного хозяйства», которая включена в реестр ведущих научных школ Санкт-Петербурга, предложено несколько технических решений по автоматизации управления качеством окорки балансов в окорочном барабане. Идея заключается в снабжении линии установленным на выходе из окорочного барабана узлом сканирования с блоками информации и программирования и его связи с приводами шандора и сбрасывателя плохо окоренных бревен. Это решение базируется на возможности автоматической оценки площади поверхности бревен с неотделившейся корой.
Теоретические исследования алгоритма разделяются по смыслу на выделение на снимке объекта (баланса) и бинаризацию изображения, которая должна максимально выделить неокоренные участки баланса. На первом этапе необходимо разделить изображение на фон и исследуемый объект (окоренный баланс). Задача сводится к поиску двух криволинейных разрезов, которые соединяют левый и правый края изображения. Условимся, что при этом в каждом столбце изображения точка одного и того же разреза единственная, а переход по линии разреза, осуществляемый от текущего столбца пикселов к соседнему, не может быть сделан со «скачком», который больше ЛЛЛЛЛЛЛЛ К пикселей по вертикали.
Обозначим оцифрованное изображение J(x, y) (изображение координаты x горизонтальное, y - вертикальное). Ширину изображения (в пикселах) обозначим W, высоту - H. Изображение разделим на две части (ширина каждой части останется W пикселов, высота - H1 и H2 соответственно). Введем функции C1(x) и C2(x), разделяющие объект (баланс) и фон сверху и снизу соответственно. Таким образом, изображение разделится на подмножества пикселов: U1 (подмножество пикселов, находящихся «выше» разреза C1(x)), D (подмножество пикселов, принадлежащих объекту, состоит из подмножеств D1 и D2) и U2 (подмножество пикселов, находящихся ниже разреза C2(x)). Из указанных условий следует:
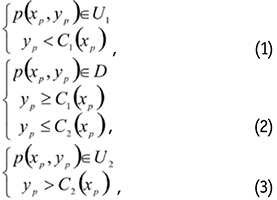

Рис. 1. Схема построения разрезов, разделяющих изображение на фон
и объект
где p(xp, yp) - произвольная точка изображения с координатами xp и yp по горизонтали и вертикали соответственно.
Схема построения разрезов, разделяющих изображение на фон и объект, представлена на рис. 1.
Дополнительно введем обозначение w(M) - число пикселов, принадлежащих некоторому подмножеству, где M - обозначение подмножества (U1, D1, D2 либо U2). Введем дополнительные обозначения для сумм яркостей и сумм квадратов яркостей подмножеств - S(M) и S(M)2 соответственно; σ2(M) - дисперсия пикселов подмножества.
По определению дисперсия пикселов подмножества равна

Для построения линий разреза используем критерий Оцу. С учетом введенных обозначений формально критерий можно записать в следующем виде:

Суммы квадратов яркостей точек изображения останутся постоянными безотносительно положения разрезов:

Таким образом, задачу поиска разрезов можно свести к поиску двух максимумов:
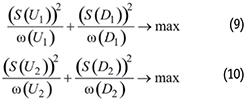
Задачи поиска максимумов функций (9) и (10) решаются методами динамического программирования.
При построении «верхнего» разреза C1(x) совокупность точек, находящихся слева от точки p(x, y) и выше линии разреза, обозначим U1xy, а точек слева от точки p(x, y) и ниже линии разреза - D1xy. При построении «нижнего» разреза C2(x) совокупность точек, находящихся слева от точки p(x, y) и ниже линии разреза, обозначим U2xy, а точек слева от точки p(x, y) и выше линии разреза - D2xy.
Для хранения числа пикселов, принадлежащих множествам U1xy, D1xy, U2xy, D2xy, введем переменные ω1U[y][x], ω1D[y][x], ω2U[y][x] и ω2D[y][x] соответственно. Для хранения сумм яркостей пикселов, входящих в множества U1xy, D1xy, U2xy, D2xy, используем переменные S1U[y][x], S1D[y][x], S2U[y][x] и S2D[y][x] соответственно.
Дополнительно вводя разные переменные, в которых хранятся числа пикселей, найдем формулы для расчетных значений критерия Оцу:
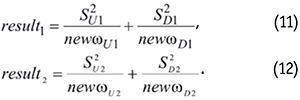
Значения yprev, при которых критерий Оцу достигает максимального значения, определяется перебором.
После того как изображение баланса отделено от фона, можем перейти ко второму этапу: разделению полученного изображения на окоренные и неокоренные зоны. Необходимо обратить внимание, что изображения неокоренных зон зачастую могут оказаться малоконтрастными по сравнению с изображением окоренной древесины. Таким образом, основной задачей обработки и анализа фотоснимков является качественная сегментация (разделение изображения на зоны, для каждой из которых выполняется некоторый критерий однородности), для чего следует использовать метод бинаризации, который представляет собой перевод цветного (или в градациях серого) изображения в двухцветное, черно-белое. Главной целью бинаризации является радикальное уменьшение объема информации, с которой приходится работать. Иначе говоря, удачная бинаризация сильно упрощает работу с изображением. Рассмотрим три варианта метода бинаризации изображения для получения качественной сегментации.
Первый метод - пороговая обработка изображения. Она заключается в сопоставлении яркости каждого пиксела изображения с заданной пороговой яркостью. Для этого можно разделить гистограммы изображения на две части с помощью заданного, единого для изображения глобального порога, после чего сегментация осуществляется путем последовательного сканирования каждого пиксела изображения (каждый пиксел отмечается как относящийся к объекту или фону по признаку яркости, в зависимости от того, превышено ли пороговое значение). Это простой метод, который позволяет достичь корректной сегментации, если гистограмма изображения носит резко выраженный бимодальный характер (если на изображении можно различить два вида часто встречающихся пикселов: «яркие» и «темные»). В этом случае гистограмма разделяется с помощью единого глобального порога T, находящегося во впадине между пиками гистограммы изображения.
Второй метод - метод Оцу. С его помощью в случае бинаризации вычисляют порог, при котором к минимуму сводится средняя ошибка сегментации. Значения яркости пикселов фотоснимка рассматривают как случайные величины, их гистограмму распределения - как оценку плотности распределения вероятностей случайных величин. При известной из гистограммы плотности распределения вероятностей возможно определение оптимального порога для разделения изображения на объект (неокоренный участок) и фон (окоренная древесина).
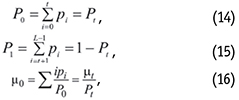
Вводятся следующие допущения и обозначения: изображение представляется с помощью L уровней яркости; hi - число элементов изображения с яркостью i, i = 0, 1, ..., L - 1; H - общее число пикселей на изображении; гистограмма изображения является нормализованной, и ее можно рассматривать как распределение вероятностей:
![]()
элементы изображения делятся на два класса C0 и C1 с использованием порогового значения t, причем группа C0 содержит пиксели с яркостью из множества (0, 1, ..., t), группа C1 - пиксели с яркостью из множества (t, t+1, ..., L - 1). Вероятность принадлежности к каждой из двух групп и средние значения их яркости описываются формулами:
![]()
- совокупная дисперсия. |
Совокупная дисперсия не зависит от порога t, она рассчитывается по формуле:
![]()
Наиболее простой функцией, зависящей от порога t, является межклассовая дисперсия, в связи с чем наиболее приемлемым с точки зрения вычислений оптимального порога t является значение η:

Метод Оцу предполагает, что порог разделения t является переменной величиной, в связи с чем при проведении экспериментальных исследований заложим эту величину в пределах от 0,5 до 1,5t* по формуле (25).
Третий метод бинаризации изображения - метод Бернсена. Все изображение делится на зоны с заданным размером. Далее для каждого пиксела изображения в пределах зоны используется порог, значение которого равно среднему арифметическому наименьшего jlow и наибольшего jhigh уровня яркости в исследуемой зоне:
![]()
Если в принятой зоне используемая мера контраста отвечает условию:
![]()
где ε - заданная пороговая величина, определяемая эмпирическим путем, то рассматриваемая зона содержит объекты только одной группы - объектов или фона.

Рис. 2. Сопоставление результатов оценки площади
неокоренной поверхности по методу пороговой обработки
изображения с экспериментальными значениями

Рис. 3. Сопоставление результатов оценки площади
неокоренной поверхности по методу Бернсена с
экспериментальными значениями

Рис. 4. Сопоставление результатов оценки площади
неокоренной поверхности по методу Оцу
с экспериментальными значениями

Рис. 5. Отклонение результатов оценки площади
неокоренной поверхности по методу Оцу от
экспериментальных значений
В задачу участников экспериментальных исследований входила проверка разработанных алгоритмов для автоматизированной оценки качества окорки балансовой древесины. Для опытов были отобраны образцы балансовой древесины, полученные на Котласском ЦБК в мае 2015 года.
Суть опытов заключалась в следующем. При помощи цифровой камеры делались снимки отобранных для опытов балансов. После отделения изображения балансов фрагменты фотоснимков обрабатывались с использованием трех описанных выше алгоритмов бинаризации изображения.
Результаты обработки изображений сопоставляли с экспериментальными данными по обмеру площади хорошо окоренных и недостаточно окоренных участков балансов. Обмер выполнялся по следующей методике: окоренный баланс оборачивали в прозрачный полиэтилен, на котором вручную обводили участки с неотделившейся корой, затем разворачивали пленку, обмеряли обведенные участки и рассчитывали их площадь.
При обработке экспериментальных данных использовались основные методы статистической обработки.
Результаты оценки площади неокоренной поверхности по фотоснимкам, а также результаты сопоставления этих оценок с данными экспериментов показали:
- оценки доли (%) неокоренной поверхности, полученные при помощи метода пороговой обработки изображения, стабильно ниже данных, полученных в ходе экспериментов (рис. 2);
- оценки, полученные при помощи метода Бернсена, в общем случае выше сведений, полученных в ходе экспериментов (рис. 3);
- в зависимости от выбранного порога разделения, при помощи метода Оцу были получены оценки, которые как выше, так и ниже оценок, полученных в результате экспериментов. Причем если заданный порог разделения близок к рассчитанному по формуле (15), оценки близки к полученным в ходе экспериментов (рис. 4, 5; табл. 1).
По данным табл. 1 можно сделать следующие выводы:
При использовании метода пороговой обработки изображения площадь неокоренной поверхности сортиментов (%), полученная при оценке снимков, меньше экспериментальных значений в среднем на 25,2%. Доверительные границы для отличия ±16,5%.
Если задать порог разделения, равный оптимальному по формуле (15), то при использовании метода Оцу площадь неокоренной поверхности, полученная при оценке фотоснимков, меньше экспериментальных значений в среднем на 3,2%. Доверительные границы для отличия ±14,4%.
При использовании метода Бернсена площадь неокоренной поверхности, полученная при оценке снимков, больше экспериментальных значений в среднем на 26,7%. Доверительные границы для отличия ±16,3%. Числа проведенных экспериментов (n = 300) достаточно, чтобы сделать вывод о доверительной вероятности полученных результатов 95%. Производственникам известна проблема оценки качества технологической щепы. Применяемый сегодня метод предполагает взятие пробы кондиционной фракции, сортировку пробы на лабораторном анализаторе, взвешивание и определение процентных соотношений фракций. Метод довольно трудоемкий и продолжительный и не позволяет оперативно получать оценку качества щепы и постоянно отслеживать его. Если по результатам анализа очередной пробы будет обнаружено, что качество щепы неудовлетворительное, довольно сложно оценить, сколько некачественной щепы уже поступило на дальнейшую обработку.
На основе изложенного выше специалисты Санкт-Петербургского государственного лесотехнического университета совместно с учеными Вятского государственного университета разработали автоматизированную систему определения качества технологической щепы - лазерный измеритель расстояния. Его основные элементы - лазер и приемник излучения. Луч лазера с высокой скоростью перемещается перпендикулярно направлению движения конвейерной ленты, отражается от поверхности щепы, находящихся на ней, и попадает в приемник. Множество отсчетов расстояния, полученных за один проход лазерного луча по ленте, позволяют получить срез массы щепы, находящейся на конвейере в конкретном месте. По мере движения ленты лазер многократно сканирует поверхность конвейера с находящейся на нем щепой и получает новые срезы. Множество срезов позволяет получить полную картину наличия щепы на конвейере и ее размеров.
Лазерное устройство приводится в движение шаговым двигателем. Управление посредством широтно-импульсной модуляции позволяет без дополнительной обратной связи точно знать, где в каждый момент времени находится лазерный луч. Однако невозможно заранее узнать, чем приводится в действие конвейерная лента и каковы допустимые пределы отклонения скорости ее движения, поэтому привод конвейера предлагается оснастить энкодером, который обеспечит информацию о точной скорости конвейера и в соответствии с ней позволит корректировать алгоритм работы сканирующего лазерного модуля.

Рис. 6. Последовательность работы предлагаемой системы
Информация с лазерного модуля и энкодера поступает на вход компьютера. Сведения о множестве состояний конвейера, последовательно поступающих на вход компьютера от лазерного модуля, и расстояние между ними, вычисленное с помощью энкодера, позволяет восстановить границы каждой отдельной щепки, рассчитать ее площадь и отнести к той или иной категории: крупная, мелкая или кондиционная. Данные накапливаются в памяти компьютера, и на основании собранной статистики можно сделать вывод о соотношении фракций щепы разных размеров. В зависимости от места установки системы и поставленных задач оператор получает информацию о ходе техпроцесса, возникновении аварийной ситуации или необходимости оперативного вмешательства в работу отдельных механизмов. Фазовый метод измерения расстояния позволяет системе работать на удалении до 15 м и обеспечивать точность измерений в долях миллиметра, что является приемлемым для данной задачи.
В качестве одного из вариантов готового сканирующего лазерного модуля предлагается использовать лазерный триангуляционный 2D-датчик LS2D производства НПП «Призма» (г. Екатеринбург). Этот датчик может обслуживать конвейер шириной 500 мм, а наличие интерфейса Ethernet 10/100 позволяет без дополнительного оборудования подключать его к компьютеру.
опытных образцов балансов

Для определения перемещения конвейера подходит любой инкрементальный энкодер в комплекте с подпружиненным крепежным рычагом и мерным колесом с резиновым покрытием. Для обработки сигналов от датчика и сканера подойдет одноплатный компьютер Raspberry PI2 со следующими характеристиками: ARM-процессор с четырьмя ядрами с частотой 1 ГГц, 1 Гбайт оперативной памяти, порт Ethernet 10/100 для подключения сканера и разъем BH-40 с портами ввода-вывода для подключения энкодера, операционная система семейства Linux.
Плюсы предложенной системы: высокие скорость и точность сканирования; форма и размеры щепы, ее положение на ленте не влияют на результат; не требуется переделка конвейера - нужно только доработать имеющееся оборудование.
Предложенная система позволит избавиться от необходимости проведения анализа проб щепы. С учетом повышения производительности установки и невысокой стоимости компонентов система окупится за несколько месяцев. Если организовать сканирование щепы до и после сортировки, то можно получать оперативную информацию о состоянии ножей рубительной машины, сит сортировочной машины, объемах нарубленной древесины и отходов.
Дарья КУНИЦКАЯ, аспирант каф. ТЛЗП СПбГЛТУ,
Игорь ГРИГОРЬЕВ, д-р техн. наук, проф., зав. каф. ТЛЗП СПбГЛТУ









